CNN — Convolutional Neural Networks
Exam Importance
MUST | Every exam has a CNN calculation question (2025 Q6, 2024 Q6, Practice Q7)
Feynman Draft
Imagine you're looking at a photo and trying to find a cat. You don't examine every pixel individually — your eyes scan small regions looking for patterns: edges, then curves, then ears, then a face. A CNN works exactly like this.
A CNN(卷积神经网络) slides small "windows" (filters/kernels(卷积核/滤波器)) across the image. Each filter detects a specific pattern:
- Layer 1 filters: detect simple edges (horizontal, vertical, diagonal)
- Layer 2 filters: combine edges into shapes (corners, curves)
- Layer 3+ filters: combine shapes into objects (ears, eyes, faces)
After sliding filters, we shrink the image with pooling(池化) (like zooming out) to focus on "where" a pattern exists rather than its exact pixel position.
Toy Example: A 5x5 image with a 3x3 filter(特征图 = feature map)
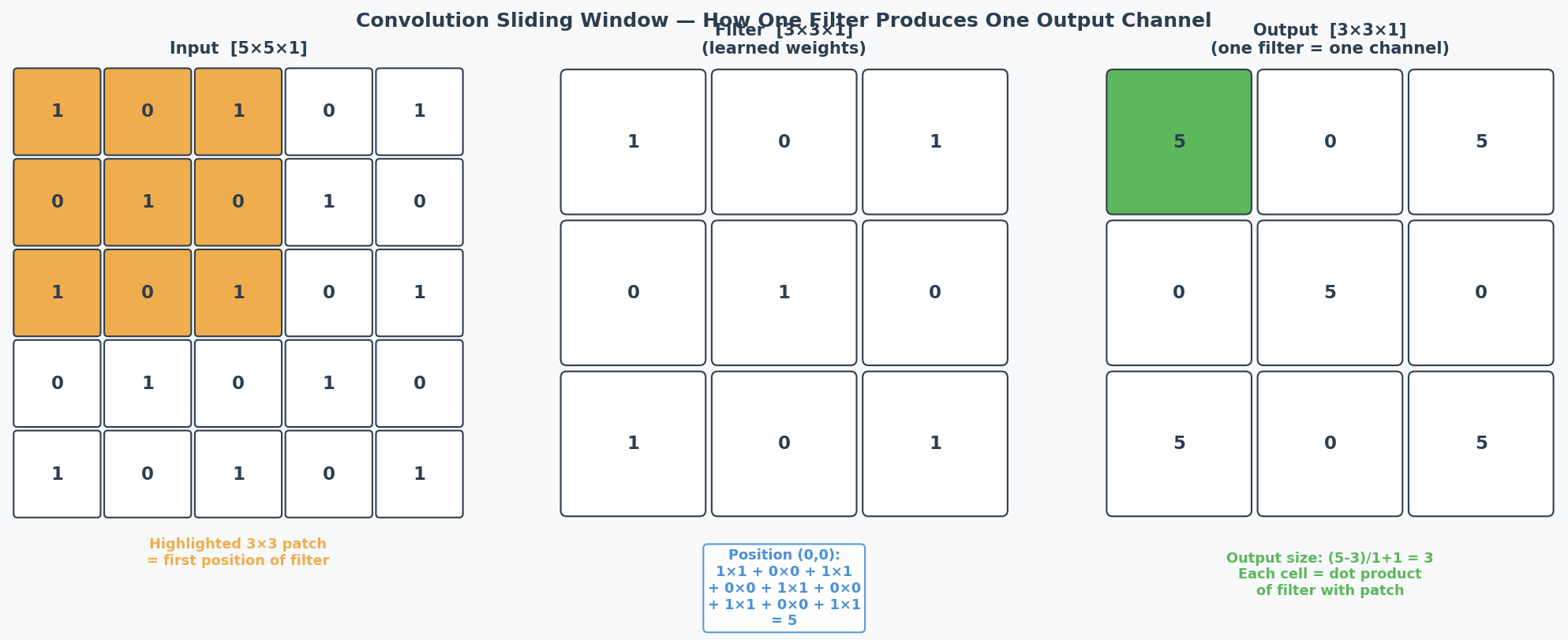
Common Misconception: "More filters = bigger output feature map." NO — more filters increases the DEPTH (channels), not the spatial dimensions. Spatial size depends on kernel size, stride, and padding.
Core Intuition: CNN = sliding pattern detector. Shallow layers find edges, deep layers find objects.
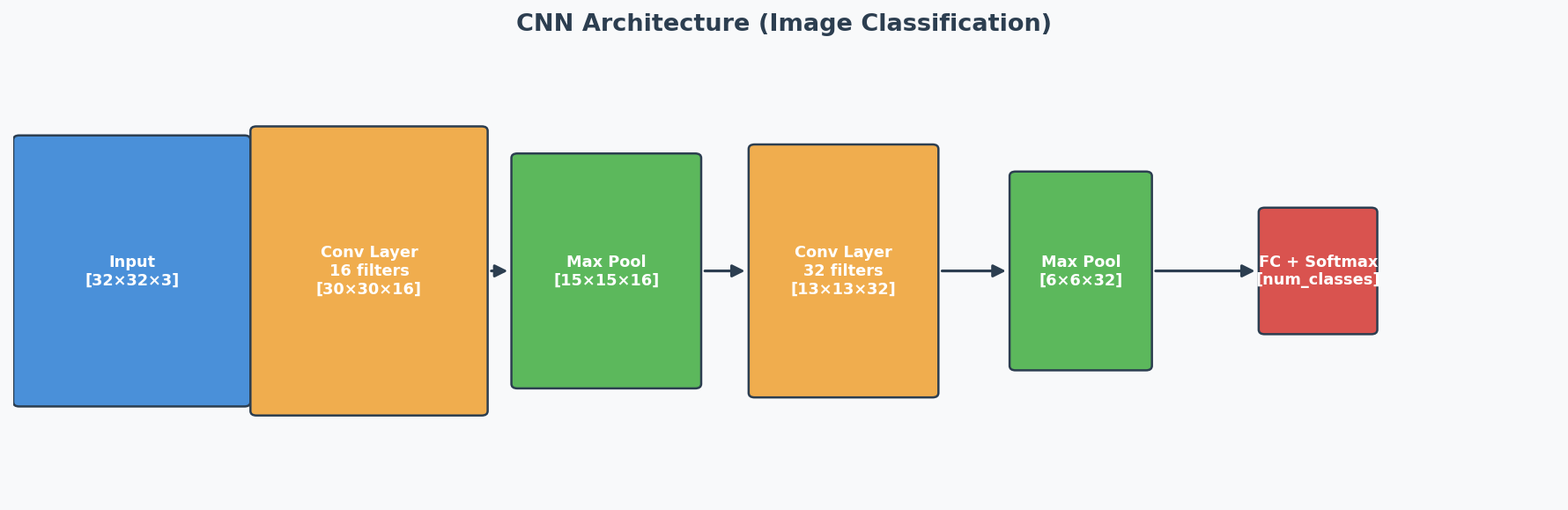
Architecture Overview
The Two Formulas You MUST Memorize
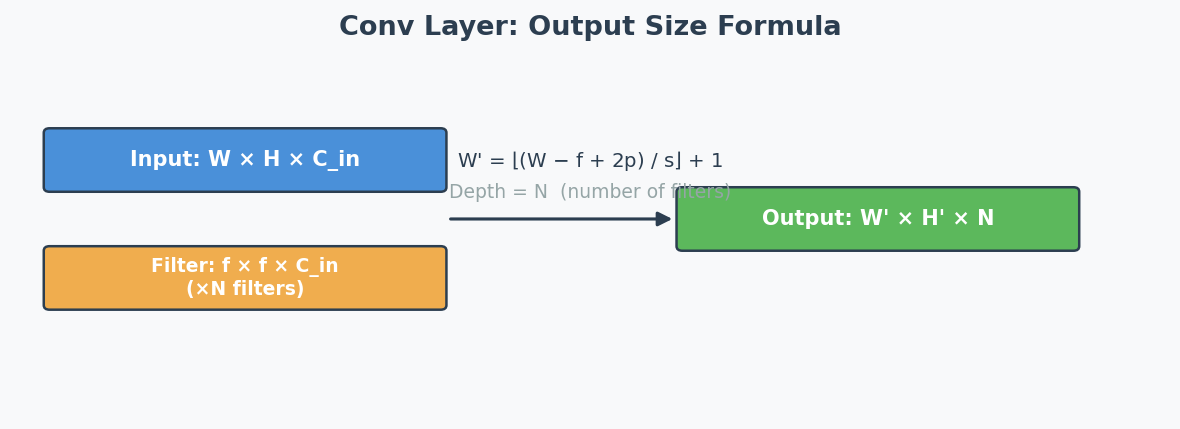
Formula 1: Convolution Output Size
$$\text{output} = \left\lfloor \frac{n + 2p - f}{s} \right\rfloor + 1$$
Where:
- $n$ = input spatial dimension (height or width)
- $p$ = padding(填充) (valid = 0, same = computed so output = input)
- $f$ = filter/kernel size
- $s$ = stride(步幅)
Output depth = number of filters $n'_C$
Formula 2: Pooling Output Size
$$\text{output} = \left\lfloor \frac{n - f}{s} \right\rfloor + 1$$
Where:
- $n$ = input spatial dimension
- $f$ = pool kernel size
- $s$ = stride (usually = f)
Output depth = same as input depth (pooling doesn't change channels!)
Key difference: Pooling has NO padding (p=0 always).
Padding Types
| Type | Meaning | Formula Effect |
|---|---|---|
| Valid padding(无填充) | No padding, p = 0 | Output shrinks |
| Same padding(等尺寸填充) | Pad so output spatial size = input spatial size | $p = (f-1)/2$ when $s=1$ |
Same padding shortcut: When stride = 1 and same padding → output spatial dimensions = input spatial dimensions. Just change the depth to the number of filters.
Worked Example: 2025 Q6 (The Exact Exam Question)
Architecture:
- Input: [35, 35, 3]
- Conv1: 10 filters, kernel=7, stride=2, valid padding
- MaxPool1: kernel=2, stride=2
- Conv2: 20 filters, kernel=3, stride=1, same padding
- MaxPool2: kernel=2, stride=2
- FC layer: ? inputs, 10 outputs
Step-by-step:
Layer: Conv1 (valid, p=0)
Input: [35, 35, 3]
Calc: (35 + 2*0 - 7) / 2 + 1 = 28/2 + 1 = 14 + 1 = 15
Output: [15, 15, 10] ← 10 from number of filters
Layer: MaxPool1
Input: [15, 15, 10]
Calc: (15 - 2) / 2 + 1 = 13/2 + 1 = 6.5 + 1 = 7.5 → floor = 7
Output: [7, 7, 10] ← depth unchanged
Layer: Conv2 (same padding, stride=1)
Input: [7, 7, 10]
Calc: same padding + stride 1 → spatial stays same
Output: [7, 7, 20] ← 20 from number of filters
Layer: MaxPool2
Input: [7, 7, 20]
Calc: (7 - 2) / 2 + 1 = 5/2 + 1 = 2.5 + 1 = 3.5 → floor = 3
Output: [3, 3, 20] ← depth unchanged
Flatten(展平): 3 × 3 × 20 = 180
Answer: (ii) 180 ✓
Worked Example: 2024 Q6
1) Conv: Input [50,50,5], ten 5×5×5 filters, stride=3, padding=0
(50 + 2*0 - 5) / 3 + 1 = 45/3 + 1 = 15 + 1 = 16
Output: [16, 16, 10]
2) AvgPool: Input [50,50,5], 5×5 filter, stride=5
(50 - 5) / 5 + 1 = 45/5 + 1 = 9 + 1 = 10
Output: [10, 10, 5] ← depth stays 5!
3) MaxPool: Same answer as AvgPool! Max vs average only changes VALUES, not dimensions.
Worked Example: Practice Q7
Given: Input [21,21,3] → Conv (no padding, s=2) → Output [9,9,100]
Find: n'C, f, nC
- n'C = 100 (depth of output = number of filters)
- f: (21 + 0 - f)/2 + 1 = 9 → (21 - f)/2 = 8 → 21 - f = 16 → f = 5
- nC = 3 (depth of input = filter width/depth)
Edge detection question: Early layers (close to input) detect edges because they see small local regions (receptive field(感受野)). Deeper layers combine these into complex features (shapes → objects).
Key Facts to Remember
| Fact | Detail |
|---|---|
| Conv changes depth | Output depth = number of filters |
| Pooling preserves depth | Output depth = input depth |
| Max vs Avg pooling | Same output SIZE, different values |
| Valid padding | p = 0, output shrinks |
| Same padding (s=1) | Output spatial size = input spatial size |
| Floor function | When division isn't exact, round DOWN |
| Filter depth | Must match input depth (filter is 3D: f × f × input_channels) |
中文思维 → 英文输出
| 中文思路 | 考试英文表达 |
|---|---|
| 先写公式再代入数字 | "Using the formula: output = floor((n + 2p - f) / s) + 1, substituting n=35, p=0, f=7, s=2: (35-7)/2 + 1 = 15." |
| 池化不改变深度 | "Pooling reduces the spatial dimensions while preserving the depth (number of channels)." |
| 最大池化和平均池化输出尺寸一样 | "Max pooling and average pooling produce outputs with the same dimensions; only the values differ." |
| Same padding时空间尺寸不变 | "With same padding and stride 1, the output spatial dimensions match the input." |
| 输出深度等于滤波器数量 | "The depth of the output equals the number of filters applied." |
本章 Chinglish 纠正
| Chinglish (避免) | 正确表达 |
|---|---|
| "The output size is 15 times 15 times 10" | "The output dimensions are [15, 15, 10]" |
| "Pooling will change the channel" | "Pooling does not change the number of channels — only spatial dimensions are reduced" |
| "The filter number decides the deep" | "The number of filters determines the output depth (channels)" |
Whiteboard Self-Test
- Can you write both formulas from memory?
- Can you compute: Input [28,28,1] → Conv(16 filters, k=5, s=1, valid) → ?
- Can you compute: [24,24,16] → MaxPool(k=2, s=2) → ?
- What's the difference between valid and same padding?
- Why does max pooling not change the depth?
- Which layers detect edges? Why?